wk 算法实测数据成像
$\omega$ K 成像算法仿真
参数与初始化
load("../data/English_Bay_ships/data_1.mat");
c = 299792458; %光速
Fs = 32317000; %采样率
start = 6.5959e-03; %开窗时间
Tr = 4.175000000000000e-05; %脉冲宽度
f0 = 5.300000000000000e+09; %载频
PRF = 1.256980000000000e+03; %PRF
Vr = 7062; %雷达速度
B = 30.111e+06; %信号带宽
fc = -6900; %多普勒中心频率
Fa = PRF;
% Ka = 1733;
lambda = c/f0;
Kr = -B/Tr;
% Kr = -7.2135e+11;
[Na_tmp, Nr_tmp] = size(data_1);
kai = kaiser(Nr_tmp, 2.5);
Ext_kai = repmat(kai', Na_tmp, 1);
data_1 = data_1.*Ext_kai;
[Na, Nr] = size(data_1);
data = zeros(Na+Na, Nr+Nr);
data(1:Na, 1:Nr) = data_1;
[Na,Nr] = size(data);
R0 = start*c/2;
theta_rc = asin(fc*lambda/(2*Vr));
Ka = 2*Vr^2*cos(theta_rc)^3/(lambda*R0);
R_eta_c = R0/cos(theta_rc);
eta_c = 2*Vr*sin(theta_rc)/lambda;
f_tau = fftshift((-Nr/2:Nr/2-1)*(Fs/Nr));
f_eta = fc + ((-Na/2:Na/2-1)*(Fa/Na));
tau = 2*R_eta_c/c + (-Nr/2:Nr/2-1)*(1/Fs);
eta = eta_c + (-Na/2:Na/2-1)*(1/Fa);
[Ext_time_tau_r, Ext_time_eta_a] = meshgrid(tau, eta);
[Ext_f_tau, Ext_f_eta] = meshgrid(f_tau, f_eta);
R_ref = R_eta_c; % 将参考目标设为场景中心
数据集,参数与RD,CS算法保持一致。
参考函数相乘
$\omega K$ 算法与CS算法类似。首先也是校正参考点的RCMC,即一致RCMC,在 $\omega K$ 算法中,为参考函数相乘。对于距离为 $R_0$ 处的目标,其回波基带相位为
\[\theta_{2df}(f_\tau,f_\eta) = -\frac{4 \pi R_0}{c}\sqrt{(f_0+f_\tau)^2-\frac{c^2 f_\eta^2}{4 V_r^2}} - \frac{\pi f_\tau^2}{K_r}\]相位中第二部分为线性调频信号的频域二次相位。第一部分本是线性相位,但由于RCM,与方位向频率产生关系,是需要校正的部分。所以参考相位相乘目的在于将参考目标相位的第一部分补偿掉,并将其线性相位置为0,这样其他目标的校正便是相对于参考目标的了。对应的滤波器为
\[H_{rfm} = \frac{4 \pi R_{ref}}{c}\sqrt{(f_0+f_\tau)^2-\frac{c^2 f_\eta^2}{4 V_r^2}}\]如果将第二部分也补偿掉,便提前完成了距离压缩,这部分可以现在做,也可以在stolt插值后做。书中推荐在之前做,但我的聚焦效果并不好。
参考函数相乘实现很简单
data_ftau_feta = fft2(data); % 首先变换到距离多普勒域
H_rfm = exp(4j*pi*(R_ref)/c*sqrt((f0+Ext_f_tau).^2-c^2*Ext_f_eta.^2/(4*Vr^2)) + 1j*pi*Ext_f_tau.^2/Kr);
data_ftau_feta = data_ftau_feta.*H_rfm; %一致rcmc
stolt 插值
$\omega K$ 算法的重点便是在stolt插值上。stolt插值的目的在于完成距离频率空间的变换。在参考函数相乘后,剩余相位为
\[\theta_{rfm} = -\frac{4 \pi (R_0-R_{ref})}{c}\sqrt{(f_0+f_\tau)^2-\frac{c^2 f_\eta^2}{4 V_r^2}}\]如果没有RCM,相位里应该没有有关方位频域的项,所以算法提出了一个新的距离向频率轴,使得满足
\[f_\tau^{\prime}+f_0 = \sqrt{(f_0+f_\tau)^2-\frac{c^2 f_\eta^2}{4 V_r^2}}\]对于一个坐标轴,其刻度肯定是线性增长。但显然,由于频率是离散的,新的stolt频率空间的离散点不一定在旧的频率空间上有对应的离散点,所以需要通过插值估算出新频率空间上离散点的值。
其实现方式与rd算法的RCMC相似。
Ext_map_f_tau = sqrt((f0+Ext_f_tau).^2+c^2*Ext_f_eta.^2/(4*Vr^2))-f0; %线性变化的stolt频率轴与原始频率轴的对应(stolt 映射)
delta = (Ext_map_f_tau - Ext_f_tau)/(Fs/Nr);
delta_int = floor(delta);
delta_remain = delta-delta_int;
%插值使用8位 sinc插值
sinc_N = 8;
data_ftau_feta_stolt = zeros(Na,Nr);
for i = 1:Na
for j = 1:Nr
predict_value = zeros(1, sinc_N);
dR_int = delta_int(i,j);
sinc_x = delta_remain(i,j) - (-sinc_N/2:sinc_N/2-1);
sinc_y = sinc(sinc_x);
for m = 1:sinc_N
index = dR_int+m+j-sinc_N/2;
if(index > Nr)
predict_value(m) = data_ftau_feta(i,Nr);
elseif(index < 1)
predict_value(m) = data_ftau_feta(i,1);
else
predict_value(m) = data_ftau_feta(i,index);
end
end
data_ftau_feta_stolt(i,j) = sum(predict_value.*sinc_y)/sum(sinc_y);
end
end
成像
data_ftau_feta_stolt = data_ftau_feta_stolt.*exp(-4j*pi*R_ref*Ext_f_tau/c);
data_final = fftshift(ifft2(data_ftau_feta_stolt), 1);
data_final = flip(data_final, 1);
%简单的后期处理
data_final = abs(data_final)/max(max(abs(data_final)));
data_final = 20*log10(data_final+1);
data_final = data_final.^0.4;
data_final = abs(data_final)/max(max(abs(data_final)));
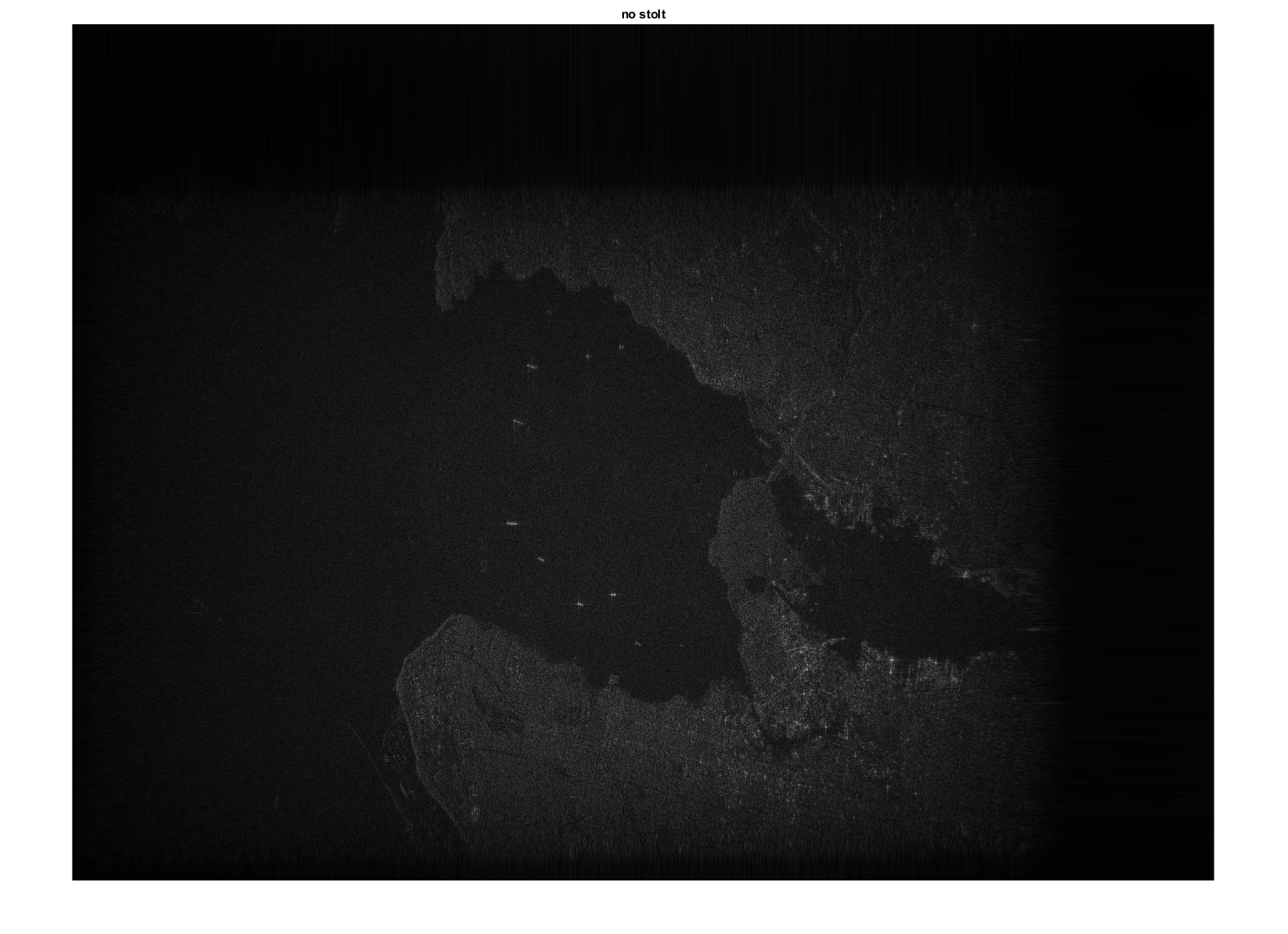
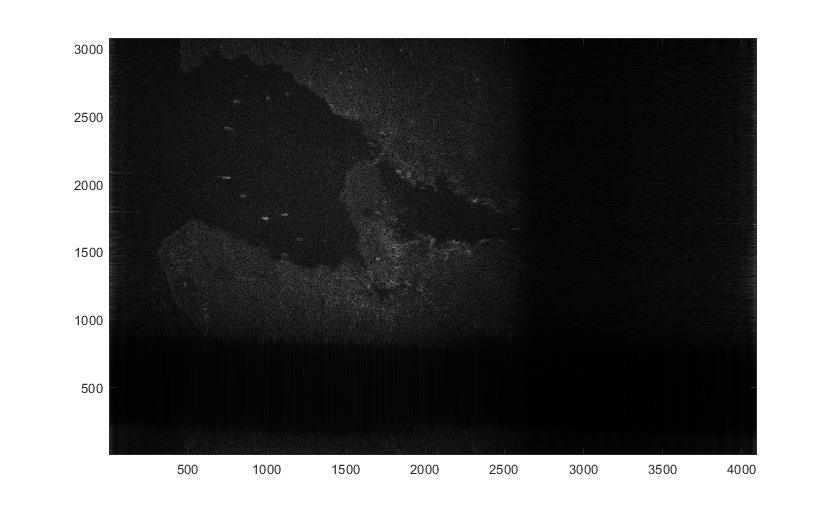
效果